
Monday, 12 January, 2026г.
















Где искать: по сайтам Запорожской области, статьи, видео ролики
пример: покупка автомобиля в Запорожье
Robô Controlado com Kinect / Control robot with Kinect (Xbox360), Arduino, ZigBee
 У вашего броузера проблема в совместимости с HTML5
У вашего броузера проблема в совместимости с HTML5
Mais informações em: https://br.linkedin.com/in/danielle-cordeiro-pedrosa-37553622
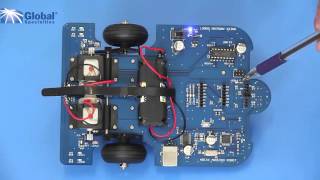
Control robot with Kinect (Xbox360), Arduino, ZigBee
Trabalho de Graduação Interdisciplinar apresentado ao Curso de Engenharia Elétrica da Escola de Engenharia da Universidade Presbiteriana Mackenzie, como requisito parcial para a obtenção do título de Engenheiro Eletricista. elaborado por Cristina Nardi, Danielle Pedrosa, Eliton Silva.
O objetivo deste artigo é apresentar uma solução para as atividades onde profissionais estão em ambientes insalubres. O sistema consiste em um robô móvel construído com 4 graus de liberdade em cada braço, utilizando servo motores e modulação PWM. O controle dos motores é gerenciado pelo ATMega 2560, embarcado em Arduino, mas é comandado por um script desenvolvido em C++/C# no Visual Studio. Este script capta as coordenadas cartesianas vindas do sensor Kinect e, através de modelagem de espaços tridimensionais, calcula e envia o ângulo de posição de cada motor através do Zigbee para o Arduino.
Теги:
Robô Arduino (Computing Platform) Atmega 2560 CC2530ZNP Texas Instruments Engenharia Elétrica Mackenzie ZigBee Natural User Interface NUI
Похожие видео


Мой аккаунт