
Tuesday, 13 January, 2026г.
















Где искать: по сайтам Запорожской области, статьи, видео ролики
пример: покупка автомобиля в Запорожье
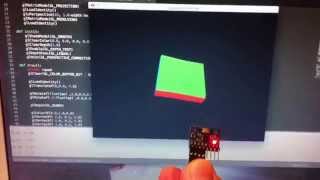
Playing around with a 6DOF IMU (MPU-6050), Arduino, Python and OpenGL
 У вашего броузера проблема в совместимости с HTML5
У вашего броузера проблема в совместимости с HTML5
The Arduino Uno is sending pitch and roll data via bluetooth. A python script is receiving the data and displaying a little cube accordingly. At this point I am using the unfiltered accelerometer data only, no gyro data.
For complementary filtered gyro data check out the other video http://www.youtube.com/watch?v=yqFfmwVufMo
Code is available at https://github.com/mattzzw/Arduino-mpu6050
Похожие видео



Мой аккаунт