
Tuesday, 13 January, 2026г.
















Где искать: по сайтам Запорожской области, статьи, видео ролики
пример: покупка автомобиля в Запорожье
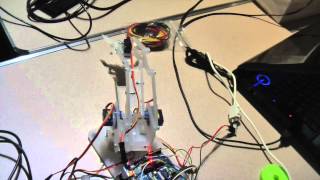
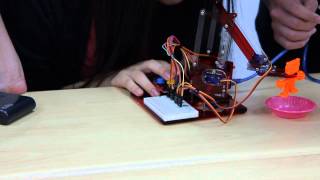
Phenoptix meArm using inverse kinematics
 У вашего броузера проблема в совместимости с HTML5
У вашего броузера проблема в совместимости с HTML5
Phenoptix meArm inexpensive laser-cut robot arm, following a path calculated via inverse kinematics, which greatly simplifies control by allowing positions specified in (x,y,z) coordinates instead of having to figure out angles for all the servos.
Code now up at https://github.com/yorkhackspace/meArm
Похожие видео

Мой аккаунт