
Thursday, 15 January, 2026г.
















Где искать: по сайтам Запорожской области, статьи, видео ролики
пример: покупка автомобиля в Запорожье
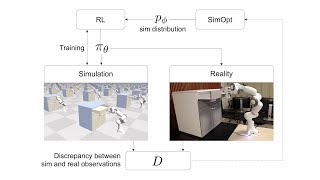
Closing the Sim-to-Real Loop: Adapting Simulation Randomization with Real World Experience
 У вашего броузера проблема в совместимости с HTML5
У вашего броузера проблема в совместимости с HTML5
Yevgen Chebotar, Ankur Handa, Viktor Makoviychuk, Miles Macklin, Jan Issac, Nathan Ratliff, Dieter Fox
We consider the problem of transferring policies to the real world by training on distribution of simulated scenarios. Rather than manually tuning the randomization of simulations, we adapt the simulation parameter distribution using a few real world roll-outs interleaved with policy training. In doing so, we are able to change the distribution of simulations to improve the policy transfer by matching the policy behavior in simulation and the real world. We show that policies trained with our method are able to reliably transfer to different robots in two real world tasks: swing-peg-in-hole and opening a cabinet drawer.
Paper: https://arxiv.org/abs/1810.05687
Похожие видео




Мой аккаунт